


Accelerating the Robot Dream
Empowering robot innovation, providing full-cycle development services, reducing costs, and accelerating the commercialization process.
Contact Us +

Henan Xspirebot
Xspirebot specializes in the design, production, and servicing of robot platform solutions.

Quality Control
A comprehensive quality control system that manages everything from raw materials to finished products.

Service & After sales
24-hour after-sales service. Please do not hesitate to contact us if you have any questions.

Download
XspireBot provide downloads of product catalogs, product solutions, and user manuals.

Key Member
Ten years of mass production experience and 32 patents in motion control.

Agricultural Industry
Agricultural robot chassis assists you in field operations such as sowing, spraying, and harvesting.

Manufacturing Industry
Industrial robot chassis assist you with tasks such as material handling, assembly, and quality inspection.

Transportation Industry
Autonomous transport robots that can deliver goods around the clock in urban and industrial environments.

Warehousing Industry
Unmanned transport robots enable full autonomy in cargo stacking & transfer within IoT logistics.

Inspection Industry
Autonomous 24/7 patrols at power facilities, industrial sites, data centers, and other locations.

Firefighting Industry
Autonomous fire detection & suppression in high-risk environments: high-rises, chemical plants, and data centers.

Robot Chassis
Xspirebot offers chassis for indoor and outdoor mobile robots suitable for different terrains.

Motors
Drive motor designed for mobile robot chassis, applied to mobile robot platform & agricultural robot chassis.

Controller/Drive
The controller can control the robot chassis's movement, positioning, obstacle avoidance, path planning, and other motion functions.

Sensor
Xspirebot offers advanced sensors for autonomous robot platforms: cameras, ultrasonic radar, LiDAR, IMU, & IINS.

Electric Motor Axle
Xspirebot adapts electric transaxle load, power output, & layout to meet customer needs.

Wired Components
Line control braking & steering enhance vehicle control efficiency & precision via electronic signals.

Energy
Solar panels & batteries offer flexible solutions, letting you choose components to suit your needs.

Company News
Xspirebot is committed to helping our customers reduce development costs, shorten the R&D cycle, and accelerate the mass production process through platformized and modularized architectural design and standardized production processes.

Exhibition News
Xspirebot is committed to helping our customers reduce development costs, shorten the R&D cycle, and accelerate the mass production process through platformized and modularized architectural design and standardized production processes.

Industry News
Xspirebot is committed to helping our customers reduce development costs, shorten the R&D cycle, and accelerate the mass production process through platformized and modularized architectural design and standardized production processes.
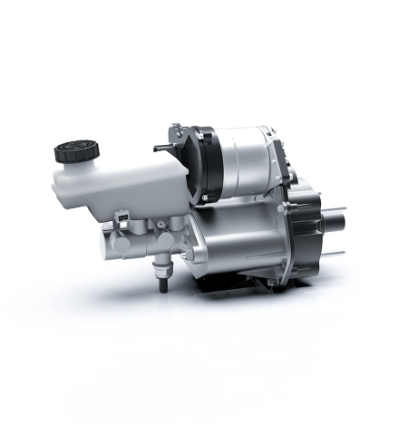
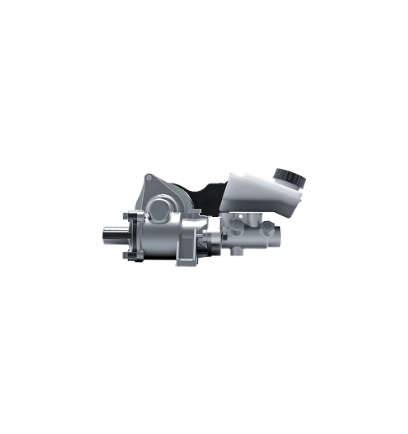
Wired Braking
Wired braking (Electric Wired Braking System, abbreviated as EWBS) is a highly advanced electronic control braking system that controls the brakes via electronic signals rather than traditional mechanical connections. On robot chassis, the wired braking system enables more precise and rapid braking responses, enhancing the safety and stability of the robot chassis. Additionally, by eliminating mechanical connections, it reduces the weight and complexity of the robot chassis, thereby improving its overall performance.
Wired braking converts brake signals into electrical signals, which are then processed by the motor controller to execute braking actions. The brake pedal functions similarly to a sensor, maintaining a relatively fixed position and not directly participating in the generation of braking force. A line control braking system typically includes components such as an electronic control unit (ECU), motor, brake, and various sensors.
The core difference between line control braking and traditional braking
Response speed and accuracy
Line control braking uses electrical signal transmission and electronic actuators, with a response time of <50 ms and a braking force error of <1%, supporting millimeter-level parking accuracy (e.g., warehouse robot shelf alignment deviation <5 mm); Traditional braking relies on mechanical linkage or hydraulic transmission, with a response time of approximately 100–200 ms and lower precision (error of approximately 5–10%), making it difficult to meet high-precision requirements.
System Complexity and Maintenance
Linear control braking eliminates components such as hydraulic lines and vacuum boosters, simplifying the structure and supporting intelligent diagnostics (e.g., real-time monitoring of motor temperature and signal anomaly warnings), reducing maintenance costs by 30%; Traditional braking systems require regular replacement of brake pads and replenishment of hydraulic fluid, and issues such as hydraulic leaks and mechanical wear frequently occur, resulting in higher maintenance costs.
Safety Redundancy and Energy Efficiency
Line control braking is equipped with a dual-controller + multi-power backup design, enabling emergency braking even in the event of a power outage or failure (e.g., firefighting robots rely on supercapacitor braking after a power outage) and supports energy recovery (e.g., braking energy recovery efficiency in electric vehicles improves by 20%-30%); Traditional braking relies on physical redundancy (e.g., mechanical handbrakes) and passive safety mechanisms (e.g., ABS requires pedal activation), resulting in low energy efficiency and limited functionality.



Advantages
1. Flexible Design
Eliminates hydraulic piping and mechanical linkage components, saving space and accommodating diverse structures such as hub motors and articulated brakes. Supports modular design for quick integration into industrial AGVs, robot chassis, special-purpose robot chassis, and other equipment.
2. Precise control
Response time <50ms, braking force error <1%, achieving millimeter-level parking precision (e.g., warehouse robot shelf alignment deviation <5mm), meeting high-precision operation requirements such as precise seeding in agricultural machinery and positioning detection in inspection robots. Dynamically adjusts braking torque to adapt to complex operating conditions such as high/low temperatures and slippery surfaces.
3. Intelligent Collaboration
Seamlessly integrates with navigation systems (such as lidar and SLAM) to automatically trigger emergency braking or energy recovery. In multi-robot collaboration scenarios (such as warehouse fleets), it supports synchronized braking command issuance to avoid collision risks and enhance safety.
4. Safety Redundancy
Dual controller + multi-power backup design ensures braking reliability in extreme scenarios. For example, after a firefighting robot's chassis loses power, it relies on a supercapacitor to perform emergency braking to prevent loss of control; real-time monitoring of motor temperature and communication status enables early fault warnings, reducing maintenance costs.
5. Strong Scenario Adaptability
Supports various chassis configurations (hub motors, Mecanum wheels) and can achieve stable braking in extreme environments (high temperatures, deep sea), such as special-purpose robots capable of withstanding 800°C high-temperature braking, expanding application boundaries.
Performance parameters
| Serial number | Project Name | Unit | Parameter |
| 1 | Product Assembly Dimensions | mm | 297*219*142 |
| 2 | Assembly Weight | kg | 6.1 |
| 3 | Motor Rated Power | W | 450 |
| 4 | Motor Maximum Current | A | 50 |
| 5 | Rated Voltage | V | 12 |
| 6 | Main Cylinder Diameter | mm | 25.4 |
| 7 | Maximum Pressure | MPa | 12 |
| 8 | Brake Pressure Control Accuracy | MPa | 0.2 |
| 9 | Brake Response Delay Time | ms | <100 |
| 10 | 0-Maximum Brake Pressure Time | ms | <300 |
| 11 | DBS Brake System Protection Rating | IP67 (excluding connectors) | |
| 12 | Operating Temperature | ℃ | -40~105 |
Application Scenarios
Line control braking is suitable for high-precision, automated, and extreme environment scenarios, such as agricultural plant protection drones (precise braking on complex terrain), firefighting robots (heat resistance up to 800°C), and autonomous delivery vehicles (autonomous braking in conjunction with navigation systems). Traditional braking is more suitable for low-cost, non-intelligent applications, such as traditional industrial vehicles or agricultural machinery.
Agricultural Robots
Field operation robots must adapt to complex terrains such as muddy and sloped areas. The line control system achieves millimeter-level hovering braking through precise braking torque adjustment (response time < 50 ms), preventing slipping or crop damage.
For example, a robot chassis combining line control braking with GPS navigation can precisely execute complex terrain spraying tasks and rely on a backup power source for emergency braking in the event of a power outage, preventing runaway risks.
Manufacturing Robots
Factory AGVs rely on line control technology to achieve rapid start/stop and precise docking during high-frequency transportation, supporting a braking distance of <0.1m under loads exceeding 500kg.
Warehouse robot chassis utilize line control braking combined with laser navigation to achieve emergency stops within 0.3 seconds, preventing shelf collisions and enhancing assembly line efficiency.
Transportation and Warehouse Robots
Logistics sorting robot chassis utilizes line control, lightweight design (reducing weight by 10%-15%), and energy recovery functionality, increasing range by 15%.
Cold chain AGVs maintain stable braking at -30°C low temperatures, meeting the high-speed mobility and precise parking requirements of unmanned delivery vehicles and similar scenarios.
Inspection Robots
The substation inspection robot chassis employs an IP67-rated line-controlled braking system, offering dust and water resistance with standby power consumption <1W. Combined with infrared obstacle avoidance, it ensures stable operation in all weather conditions. 5G remote control functionality enables real-time emergency braking, ensuring safety in high-risk scenarios such as oil and gas pipelines.
Firefighting Robots
The chassis of firefighting robots must reliably brake in high-temperature and toxic environments. The line control system supports three power backups (main battery + supercapacitor + mechanical braking), withstands temperatures up to 800°C, and meets ATEX explosion-proof certification.
The chassis of firefighting robots achieves emergency braking within 10 seconds after power loss via line control braking, preventing loss of control in fire scenes.



Product Classification
Accelerating the Robot Dream
Empowering robot innovation, providing full-cycle development services, reducing costs, and accelerating the commercialization process.
Contact Us +